
仪器编号:登录后查看
所属平台: 其他
仪器状态:
所属单位: 浙江大学 > 控制科学与工程学院 > 工业控制技术国家重点实验室
仪器生产商: 自制
购置日期: 2021-04-20
规格型号: 自制
放置地址:其他 > 浙江省杭州市滨江区东冠路611号(杭州迦智科技有限公司)
仪器管理员:潘惠如
联系电话:登录后查看
| 工作时间: | 09:00-12:00;14:00-18:00 |
|---|---|
| 最小可预约时间段: | 0.5 小时 |
| 最大可预约时间段: | 168 小时 |
| 日历最小单位: | 0.5 小时 |
| 最近提前预约时间: | 未授权用户: 24小时; 普通资格用户: 24小时; 资深资格用户: 24小时 |
| 最远提前预约时间: | 初级: 720 小时 0 点; 普通: 720 小时 0 点; 资深: 720 小时 0 点 |
| 最大有效预约次数: | 5 次/天 |
| 无代价撤销预约时间: | 1440 分钟 |
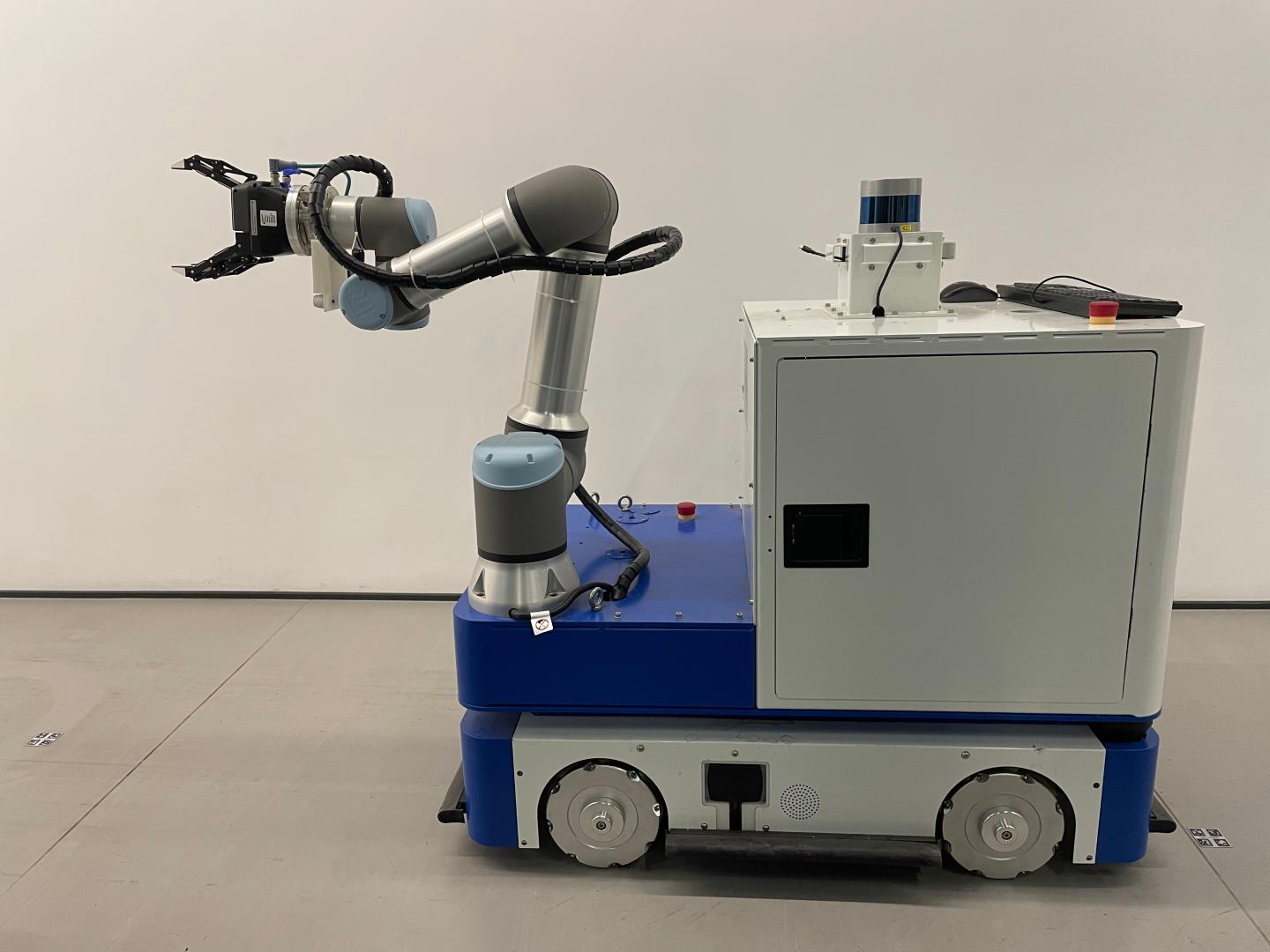
| 仪器介绍: | 1) 机械臂:UR16e 机械臂,六个自由度,最大负载 16kg ,工作半径 900mm,最大末端运动速度能达到 1m/s,位置控制精度为±0.01cm,控制频率为 500Hz。 2) 移动底座:麦克纳姆轮配置,拥有全向移动能力。自重 150kg,负载达 200kg,配备双 SICK 系列的 2d 激光传感器,运行速度最大达 1.2m/s,位置控制精度达±0.002m,速度控制频率为50Hz。 3) 计算机:为该机器人配备了 Nuvo-7160GC 工控机,该型号工控机配有 GTX1660 的独立显卡,I7-9700 的处理器,并配有 8 个独立网口,8 个 独立 USB3.0 接口。 4) 逆变器:在机器人上加装48V—220V的逆变器。其主要作用是将 48V 蓄电池的直流输出逆变为220V交流输出,可以外接插排以供各类新增硬件的电源适配器使用。 |
| 主要参数: | 1) 机械臂:UR16e 机械臂,六个自由度,最大负载 16kg ,工作半径 900mm,最大末端运动速度能达到 1m/s,位置控制精度为±0.01cm,控制频率为 500Hz。 2) 移动底座:麦克纳姆轮配置,拥有全向移动能力。自重 150kg,负载达 200kg,配备双 SICK 系列的 2d 激光传感器,运行速度最大达 1.2m/s,位置控制精度达±0.002m,速度控制频率为50Hz。 3) 计算机:为该机器人配备了 Nuvo-7160GC 工控机,该型号工控机配有 GTX1660 的独立显卡,I7-9700 的处理器,并配有 8 个独立网口,8 个 独立 USB3.0 接口。 4) 逆变器:在机器人上加装48V—220V的逆变器。其主要作用是将 48V 蓄电池的直流输出逆变为220V交流输出,可以外接插排以供各类新增硬件的电源适配器使用。 |
| 序号 | 标题 | 文件数量 | 添加时间 | 操作 |
|---|
| 序号 | 标题 | 添加时间 |
|---|---|---|
| 暂无数据 | ||
| 备案收费标准 | 登录后可查看 |
|---|---|
| 说明:原则上按备案收费标准执行,实际收费标准可在仪器预约时查看或咨询仪器管理员。 | |
